钻头应用通过机器实施,利用XY步进和一个钻头轴 (z-方向)。每个洞都独立测量和钻进。
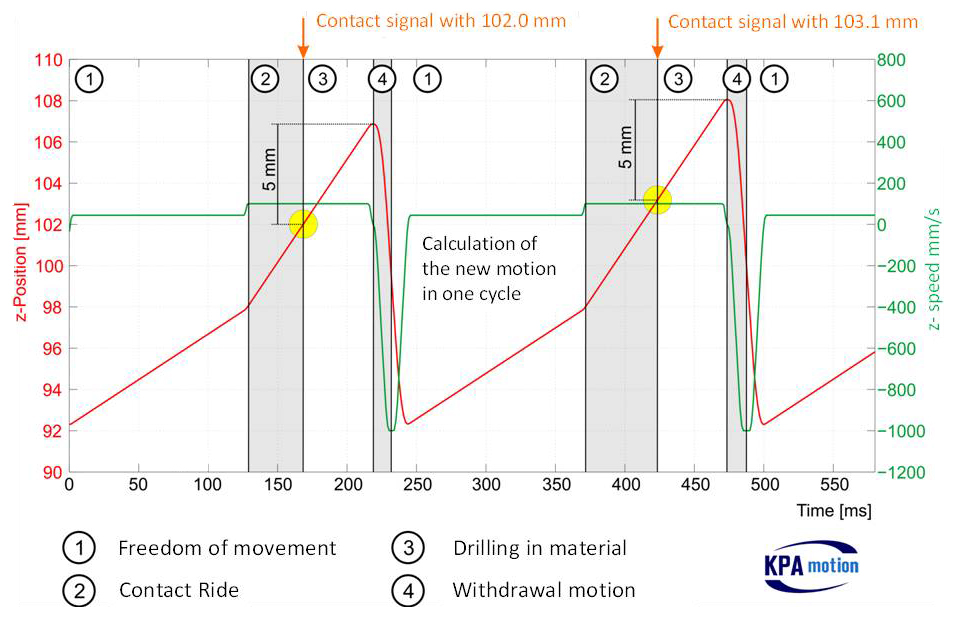
第1阶段开始慢运动,定位x-y表格。第2阶段包含快速接近运动,在这期间,预期和材料接触。在接触一刻,用接触探头传感器 ( 102.0 mm, 左黄色圆圈)捕获准确位置。并且在相同控制循环中,在线计算出对于该位置的钻头运动并且马上执行(第3阶段)。在达到5 mm深度后,钻头从材料中拉出(第4步)。在第2个循环中,在 103.1 mm(右黄色圆圈)处探测到接触。
下图显示传统计算方法和KPA运动的在线轨道生成概念实现之间的不同:
测量精确接触位置和即可计算新运动轨道极大改进了钻进、旋转和研磨精度 - 不再减慢生产流程。
KPA EtherCAT运动相关项目
|
